رادار ماشین و کاربرد آن در دنیای امروز
رادار ماشین:
پیشرفتهای اخیر، فرصتی را برای ساخت سیستمهای رادار ماشین یکپارچه تک تراشهای بسیار کوچک و مقرونبهصرفه فراهم میکند که در فرکانسهای موج میلیمتری و فراتر از آن کار میکنند. این سیستمهای راداری کوچک طیف گستردهای از کاربردهای جدید مانند رادار ماشین، رادار کلاه ایمنی، رادار هدایت ربات، رادار جلوگیری از برخورد پهپاد و نقشهبرداری، رادار ایمنی دوچرخه و بسیاری از امکانات دیگر را امکانپذیر خواهند کرد. پیشرفت قابل توجهی در طراحی و ساخت چنین سیستم هایی حاصل شده است. با این حال، بسیاری از چالشها مربوط به محدودیتهای تحمیلشده توسط فناوری آیسی فرکانس رادیویی مانند نیمههادیهای اکسید فلزی مکمل (CMOS) از جمله محدوده دینامیکی متوسط و رقم متوسط نویز برای تقویتکنندههای نویز کم (LNA)، نویز فاز نوسانگر، توان انتقال محدود و غیره هستند. همچنین احتمالاً یک چالش تداخل مهم ناشی از تعداد زیادی رادار کوچک است که در مجاورت فضایی و طیفی نزدیک در بسیاری از برنامههای پیشبینیشده کار میکنند.
در این جا برخی از چالشهای طراحی پیش روی رادار موج میلیمتری ارائه میکنیم و پیشرفتهای اخیر در طراحی سیستم و تکنیکهای پردازش سیگنال، از جمله زمانبندی شکل موج تطبیقی و کاهش تداخل را روشن میکنیم. پیشرفتها در پردازش سیگنال به رادارهای متعدد اجازه میدهد تا با استفاده از زمانبندی شکل موج تطبیقی به شیوهای ناهماهنگ با قدرت پردازش محدود عمل کنند، که منجر به کاهش تداخل بهتر و عملکرد برد بالاتر میشود.
ما برخی از ویژگیهای طیف موج میلیمتری را ارائه میکنیم و روشهای ردیابی پرتو را بهعنوان یک پلتفرم آزمایشی کارآمد، دقیق و سریع برای برنامههای رادار مصرفکننده بررسی میکنیم، که در آن یک مدل انتشار ردیابی پرتو برای رادار ماشین که در یک محیط شهری کار میکند، توسعه میدهیم.
همچنین، ما ابزارهای جدیدی را از هندسه تصادفی معرفی میکنیم تا آمار تداخل حاصل از بسیاری از رادارهایی را که طیف یکسانی را در یک مکان خاص به اشتراک میگذارند، مشخص کنیم. به طور خاص، ما برنامه های رادار خودرو را مطالعه می کنیم و آمار تداخل و عملکرد تشخیص تخمین زده شده را به دست می آوریم.
در نهایت، ما به طور خلاصه برخی محدودیتهای اساسی اعمال شده بر قابلیتهای سیستم رادار، توسط فناوری CMOS و ظرفیت حمل اطلاعات امواج الکترومغناطیسی را مورد بحث قرار میدهیم.
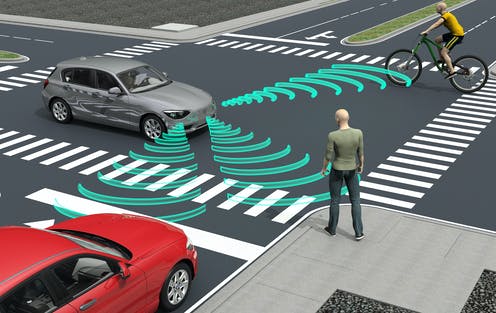
رادار ماشین در حال تبدیل شدن به یک فناوری مهم خودرو است. سیستمهای رادار ماشین حسگر اصلی مورد استفاده در کروز کنترل تطبیقی هستند و یک سیستم حسگر حیاتی در سیستمهای کمک رانندگی خودکار (ADAS) هستند. در ADAS، رادار خودرو یکی از چندین سیستم حسگر برای جلوگیری از برخورد، تشخیص عابر پیاده و دوچرخه سوار است و مکمل سیستم های حسگر دوربین مبتنی بر دید است. فناوری راداری که عموماً مورد استفاده قرار می گیرد، رادار موج پیوسته مدوله شده با فرکانس یا رادار FMCW است که کاملاً با رادار پالس داپلر متفاوت است. سخت افزار آنالوگ و RF در میلی متر FMCW بسیار کم هزینه تر از رادار پالس داپلر است. علاوه بر این، نیازهای پردازش دیجیتال عموماً متوسط هستند و میتوانند در آرایههای دروازهای قابل برنامهریزی میدانی کمهزینه، ریزپردازندهها با موتورهای شتابدهنده تخصصی، یا مدارهای مجتمع ویژه برنامههای کاربردی خاص انجام شوند.
در سال های قبلی، استفاده از پردازش داپلر به عنوان یک روش کلیدی برای تشخیص فاصله و سرعت مورد بحث قرار گرفت. تبعیض در جهت (یا زاویه رسیدن به آنتن ها) با نشانه گیری سیگنال رادار، با استفاده از فرمان سنتی سهمی یا الکترونیکی پیشرفته تر آنتن های آرایه ای ارائه می شود.
تحت شرایط خاص، روش های دیگری مورد نیاز است. به عنوان مثال، گاهی اوقات از پارازیت ها برای جلوگیری از شناسایی توسط رادار ماشین استفاده می شود. جمرها اغلب سیگنال قدرتمندی را در کل محدوده فرکانس رادار منتشر می کنند. در موارد دیگر، یک هدف متحرک چنان حرکت آهسته ای دارد که پردازش داپلر قادر به تشخیص درمورد درهم و برهمی پس زمینه ثابت-مانند حرکت شخص یا وسیله نقلیه با سرعت راه رفتن نیست. تکنیکی به نام پردازش تطبیقی فضا-زمان (STAP) می تواند برای یافتن اهدافی که در غیر این صورت قابل شناسایی نیستند، استفاده شود.
گرایش ها و نوآوری های سخت افزاری
از GaAs به SiGe تا Si: ما قبلاً یک انتقال کامل برای GaAهای سیمی متصل شده روی برد به SiGe بسته بندی شده در سطح ویفر دیده ایم. این انتقال در سال 2008/9 آغاز شد و تا حد زیادی تکمیل شد. گره فناوری 180 نانومتری است و برخی نیز روی 130 نانومتر کار می کنند. با این حال، اکنون در آغاز یک انتقال دیگر هستیم. این بار از SiGe به سمت Si CMOS یا SOI.
Si CMOS و گرههای فناوری کوچکتر در رادار ماشین: با افزایش حجم تقاضا، تخصیص گرههای فناوری پیشرفتهتر به تولید IC سیلیکون رادار توجیه اقتصادی دارد. این گره های کوچکتر به نوبه خود، آی سی های مبتنی بر سیلیکون را قادر می سازند تا تحرک کمتر ذاتی سیلیکون را جبران کنند. گره های اصلی انتخاب امروزی 40/45 نانومتر، 28 نانومتر و 22 نانومتر هستند. برخی حتی برای 16 نانومتر پیش می روند. این روند به سمت گره های کوچکتر با افزایش تقاضای حجم ادامه خواهد یافت.
از انفرادی تا آی سی های همه کاره کاملاً یکپارچه: انتقال به CMOS امکانات ادغام عملکرد بیشتری را به همراه خواهد داشت. در دوران قبل از 2010، قالب های GaAs به عنوان چیپ روی برد (COB) مونتاژ می شدند. پس از سال 2012، ما شاهد بسته های SiGe WLP بودیم، اما هر واحد Rx و Tx دارای یک بسته جداگانه بود. از سال 2014 تا 2017، شاهد ادغام چندین Rx/Tx در یک بسته واحد به همراه برخی از عملکردهای نظارت بودیم. در مرحله بعد، تولید شکل موج نیز یکپارچه شد. اکنون – با ظهور IC های رادار Si CMOS یا SOI – ما شاهد ادغام میکروکنترلر و DSP در یک بسته هستیم. این منجر به یک IC رادار یکپارچه و همه کاره می شود – یعنی آی سی مدیریت انرژی همچنان خاموش است.
بسته های پیشرفته و AiP: اولین نسل رادار ماشین ، برد رادار از برد پردازش و مدیریت توان جدا شد. در نسل دوم، آنها هنوز جدا بودند، اما اندازه برد RF کوچک شده بود. در نسل فعلی، داشتن برد دیجیتال/RF هیبریدی رایج است.
یک روند نوظهور برای ادغام آنتن در بسته (AiP). این روند در توسعه رادار برای کاربردهای خودرویی و غیرخودرویی دیده می شود. در واقع، OSAT ها قبلاً بسته های AiP MRR 77 گیگاهرتز eWLB درجه خودرو را واجد شرایط کرده اند. در این حالت، آنتن در لایه Cu RDL (لایه توزیع مجدد) یکپارچه می شود.
در مورد دیگر، AiP برای رادارهای مبتنی بر سیلیکون 122 گیگاهرتز با شش آنتن یکپارچه در یک بسته نیز راهاندازی میشود که یک راهحل تراشه واحد ایجاد میکند که نظارت بر بیماران یا سالمندان، نظارت بر داخل کابین و برنامههای مشابه را هدف قرار میدهد. توجه داشته باشید که اندازه و فاصله آنتن با فرکانس کوچک میشود و AiP را حتی برای آرایههای آنتن بزرگتر ممکن میکند.
توجه داشته باشید که گرایش به سمت AiP در بسته mmWave 5G نیز دیده می شود. این دو تحول مشترکات زیادی خواهند داشت و هم افزایی خواهند داشت.
به طور کلی، فرکانس رادار ماشین به سمت محدوده 77-81 گیگاهرتز تغییر کرده است. با بالا رفتن فرکانس، وضوح سرعت شعاعی و قابلیت جداسازی زاویه ای بهبود می یابد. پیادهسازی پهنای باند وسیعتر آسانتر خواهد شد زیرا پهنای باند وسیع بخش کوچکتری از فرکانس مرکزی خواهد بود. پهنای باند وسیع تر مستقیماً به وضوح برد بالا تبدیل می شود.
روندها و نوآوری های نرم افزاری
پیشرفت های سخت افزاری مهم هستند، اما آنها تنها بخشی از داستان هستند. در یک رادار ماشین معمولی، سیگنال ورودی ابتدا دیجیتالی میشود و سه دور تبدیل فوریه سریع برای ایجاد ماتریس دادههای برد و سرعت و یافتن حضور اشیا از طریق تشخیص پیک سیگنال انجام میشود.
برای به دست آوردن زاویه، معمولاً از چندین آنتن استفاده می شود و اختلاف فاز ناشی از جداسازی فیزیکی آنتن ها را به یک زاویه برآورد رسیدن تبدیل می کند. با توجه به آرایش چند آرایه ای، داده های خروجی در حال حاضر معمولاً یک مکعب داده سه بعدی هستند. در اینجا، به طور کلی، اندازه آرایه آنتن وضوح را تعیین می کند.
به راحتی می توان تصور کرد که با افزایش اندازه آرایه آنتن، سرعت داده به سرعت افزایش می یابد – یعنی 240-360 گیگابیت بر ثانیه با رادار 16-24Rx/8-12Tx. این منجر به چالش هایی در مدیریت داده ها می شود که در اینجا بیشتر به آن نمی پردازیم.
به سمت تشخیص و ردیابی سه بعدی چند شی: در رانندگی خودکار، ما باید کارهای بیشتری انجام دهیم: باید چندین شی را شناسایی و ردیابی کنیم، ترجیحاً به صورت سه بعدی. برای این منظور، نیاز به یادگیری عمیق یا الگوریتم قطار مبتنی بر CNN است.
پیشنهاد می شود >>> خرید ردیاب خودرو
رادار ماشین محدودیت های زیادی دارد. به عنوان مثال، پراکندگی ابر نقطه رادار سنتی کم است. برای درک این محدودیت، در نظر بگیرید که ویدئو و لیدار در هر اسکن 2M و 165k وکسل تولید می کنند، در حالی که رادار 10k تولید می کند. به عبارت دیگر، رادار در مقایسه با یک دوربین استاندارد 2 مگاپیکسلی مانند یک دوربین 10 کیلوپیکسلی است. برای رفع این چالش، آرایه های آنتن عظیم مورد نیاز است.
با این وجود، استفاده از رادار برای شناسایی و ردیابی اشیا یک مرز رو به رشد تحقیقاتی است. مجموعه داده های رادار ماشین برای رانندگی خودران در حال توسعه و در دسترس قرار گرفتن هستند، گاهی اوقات به عنوان منبع باز – به عنوان مثال، Astyx. مکانیسم های برچسب گذاری نیمه دستی برای تسریع و کاهش هزینه حاشیه نویسی داده های آموزشی در حال توسعه هستند.
در یک رویکرد، بینایی ماشین مبتنی بر دوربین برای اولین بار برای تشخیص اشیاء، ترسیم یک جعبه محدود در اطراف آن استفاده می شود. سپس، دادههای لیدار برای عمق دادن به جعبه مرزی استفاده میشود، و اقلام درون جعبه مرزی را به عمق جدا میکند. در نهایت، خوشههای راداری که در جعبه مرزی دوربین + اشیاء شناسایی لیدار قرار میگیرند، بهطور خودکار حاشیهنویسی میشوند. به این ترتیب، زمان برچسب گذاری یک خوشه به 0.02 ثانیه کاهش می یابد (در مقایسه با 10 دقیقه برای دستی). البته این کار به پردازنده های گرافیکی قدرتمند نیاز دارد. مهمتر از همه این است که دقت هنوز به آن بالا نیست (72٪ در مقابل 99٪ برای دستی).
نکته قابل توجه نتایج اخیر دانشگاه دلفت است که میانگین نمرات F1 را از نظر هدف 0.7 نشان می دهد. برای دستیابی به این نتایج برجسته، محققان داده های سطح پایین و سطح هدف را برای آموزش الگوریتم به کار بردند. بینش اصلی در اینجا این بود که هر کلاس شی دارای مجموعه ای منحصر به فرد از امضاهای حرکتی است که در مکعب سه بعدی مدفون شده اند.
امیدوارم که ما نشان داده باشیم که فناوری رادار ماشین وارد عصر طلایی نوآوری و رشد شده است. یکی از محورهای توسعه، ایجاد رادارهای تک تراشه ای ارزان قیمت AiP در همه جا است. یکی دیگر از مقیاسبندی آرایه آنتن و معماری سیستم برای بهبود وضوح و ابر نقطه چگالی است. به موازات آن، رادار از تشخیص سرعت، زاویه و مکان به شناسایی و ردیابی اجسام سه بعدی در حال حرکت است. در بخش خودرو، بازار با پشتیبانی از روندهای افزایشی قوی به سرعت در حال رشد است. رادار همچنین پایه و اساس را برای تبدیل شدن به یک فناوری حسگر رایج در بسیاری از فعالیت های روزمره از جمله نظارت بر انسان، تشخیص ژست ها و غیره ایجاد می کند.
امیدوار هستیم شما ابهامات شما را در این مقاله برطرق کرده باشیم.تمام سعی تیم تهران تیونینگ خدمت رسانی به شما عزیزان می باشد.